FMCW 雷达原理
连续波雷达(CW Radar)测速原理
连续波雷达测速度的核心原理是多普勒效应,即目标沿雷达径向运动时,回波频率会发生偏移。下面是公式推导:
① 发射信号
假设雷达发射一个连续正弦波信号:
stx(t)=Acos(2πfct)
其中,fc 为雷达载波频率,A 为信号幅度。
② 回波信号
若目标距离为 R(t),则回波会有延迟 τ(t),如下:
τ(t)=c2R(t)
回波信号为:
srx(t)=Arcos(2πfc(t−τ(t)))
其中 Ar 是回波幅度,考虑到距离衰减和目标反射。
③ 目标运动
假设目标沿径向速度为 v,以正向远离雷达为正,则:
R(t)=R0+vt⇒τ(t)=c2(R0+vt)
将 τ(t) 代入回波信号:
srx(t)=Arcos[2πfc(t−c2(R0+vt))]=Arcos[2πfct−c4πfc(R0+vt)]=Arcos[2π(fc−λ2v)t−c4πfcR0]
注:波长 λ=c/fc
④ 多普勒频移
通过上面公式推导,可以得出,回波信号的瞬时频率为:
frx=fc−λ2v
与发射信号的频率相比,频率偏移为:
fD=λ2v
从而通过解出速度,如下:
v=2λfD
特别说明
普通连续波雷达没有发射脉冲,不知道信号何时返回,无法测量距离。 若要测距,需要对连续波进行调制,例如线性调频(FMCW)或脉冲调制。
FMCW 雷达:锯齿波测距原理
FMCW雷达是在CW基础上叠加频率调制,常见形式是锯齿波调频,下面是推导过程:
① 发射信号
假设单次线性频率调制在区间 0≤t≤Tc内上升,瞬时频率为:
ftx(t)=fc+kt
其中 fc 为起始载波频率,k 为调频斜率(Hz/s)。若单次扫频带宽为 B,则 k=B/Tc
对应的瞬时相位(取相位相对于 t=0 的积分):
ϕtx(t)=2π∫0tftx(τ)dτ=2π(fct+21kt2)
于是,复包络为:
stx(t)=ejϕtx(t)=ej2π(fct+21kt2)
② 回波信号
目标与雷达的往返时延为
τ=c2R
回波是发射信号的延迟、衰减并带相移的版本,复包络可写为
srx(t)=Aejϕtx(t−τ)=Aej2π(fc(t−τ)+21k(t−τ)2)
其中,A 含衰减与反射。
③ 混频
接收机通常将回波与本地发射信号相乘并低通滤波(或与发射的共轭相乘),即取
smix(t)=srx(t)⋅stx∗(t)=Aej(ϕtx(t−τ)−ϕtx(t))
拍相位为:
ϕb(t)=ϕtx(t−τ)−ϕtx(t)
代入相位表达式:
ϕtx(t−τ)=2π(fc(t−τ)+21k(t−τ)2)=2π(fct−fcτ+21kt2−ktτ+21kτ2)
而
ϕtx(t)=2π(fct+21kt2)
因此,差相位为:
ϕb(t)=ϕtx(t−τ)−ϕtx(t)=2π(−fcτ−ktτ+21kτ2)
常数项 −2πfcτ、随 t 线性增长的项 −2πktτ、以及与 t 无关的常数项 +πkτ2。
于是混频输出为
smix(t)=Aejϕb(t)=Aexp{j2π(−fcτ−ktτ+21kτ2)}
④ 拍频
拍频定义为拍相位对时间的导数除以 2π:
fb(t)=2π1dtdϕb(t)
对上式求导,也就是对 t 求导:
dtdϕb=2π(−kτ)⇒fb=−kτ
取频率的模值,只关系拍频大小:
fb=kτ
把 τ=c2R 带入,得到经典测距关系:
fb=c2kR⟹R=2kcfb
注:符号上的正负只表明相位差的方向,测距时取绝对频率即可。
⑤ 其他表示方法
因为 k=B/Tc,也可写为
R=2kcfb=2BcTcfb
下面是调频连续波雷达(锯齿波)的原理图:

图 1:锯齿形调频连续波雷达的测距原理
FMCW 雷达:锯齿波测速原理
FMCW 雷达要实现同时测距和测速,常用的处理方法是二维 FFT(Range-Doppler 处理):
- 横向(快时间)FFT → 将每条 chirp 内的拍频转化为距离信息;
- 纵向(慢时间)FFT → 将多个 chirp 的相位随 chirp 序号的演化转化为速度信息。
① 慢时间信号
对于一个固定距离(即拍频对应的某个距离),从连续多条 chirp 中采样复数值,得到一个关于 chirp 序号 m 的序列:
s[m]=Aej(2πfDmTc+ϕ0),m=0,1,…,M−1
其中:Tc 为单条 chirp 时长,M 为连续 chirp 的数量,fD=λ2v 为多普勒频率,ϕ0 为初始相位。
直观理解:目标在运动时,每经过一条 chirp,回波相位会在慢时间方向上“逐渐旋转”,形成一个等比相位序列。
② 慢时间 FFT
将 s[m] 在 m 方向做 FFT:
S[k]=m=0∑M−1s[m]e−jM2πkm,k=0,1,…,M−1
这是对慢时间采样信号的离散频谱分析。
FFT 的峰值出现在
fD≈MTck
从而可以估计多普勒频率:
f^D=MTckpeak
由多普勒公式,速度计算为:
v=2λf^D
FMCW 雷达:三角波测距、测速原理
① 三角波调频
在锯齿波调制中,频率单向线性增加;而 三角波调频 由 上行 chirp(up-chirp) 和 下行 chirp(down-chirp) 构成:
ftx(t)=⎩⎨⎧fc+kt,fc+k(2Tc−t),0≤t<Tc(up-chirp)Tc≤t<2Tc(down-chirp)
其中:
- k=B/Tc:调频斜率,上行与下行符号相反
- 一个完整周期包含 up-chirp 与 down-chirp,总时长 2Tc
② 上行、下行拍频
假设目标相对于雷达移动,信号一方面产生距离的时延,时延影响拍频;另一方面产生速度的多普勒频移,频移也影响拍频。
目标距离 R、径向速度 v,对应时延与频移为:
τ=c2R,fD=λ2v
上行、下行拍频 = 距离引起的拍频 ± 多普勒频移。
fb↑=kτ+fD
fb↓=−kτ+fD
③ 距离、速度解算
将上行、下行的拍频结合,可解耦出 R 和 v:
R=4kc(fb↑−fb↓)
v=4λ(fb↑+fb↓)
下面是调频连续波雷达(三角波)的原理图:
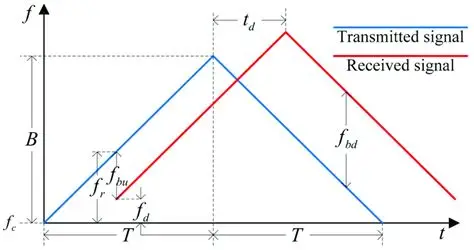
图 2:三角形调频连续波雷达的测距原理
性能指标
ΔR=2Bc
Rmax=2cTc
Δv=2MTcλ
vmax=4Tcλ

